



Rain tests for automated driving – Digitrans launches Outdoor Rain Plant
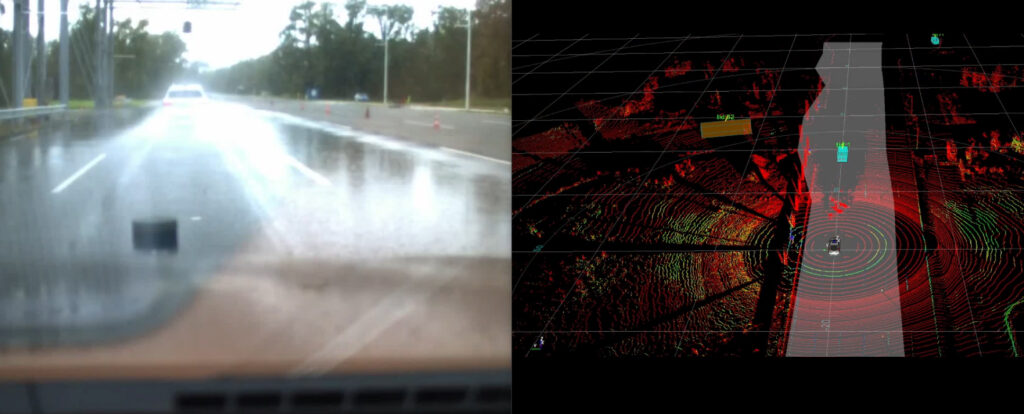
On November 16, 2022, the specially developed outdoor rain plant for rain tests of automated vehicles and their sensors was put into operation. The system makes it possible to generate realistic rain at the push of a button, thus significantly simplifying the testing of sensors for environment detection in rain.

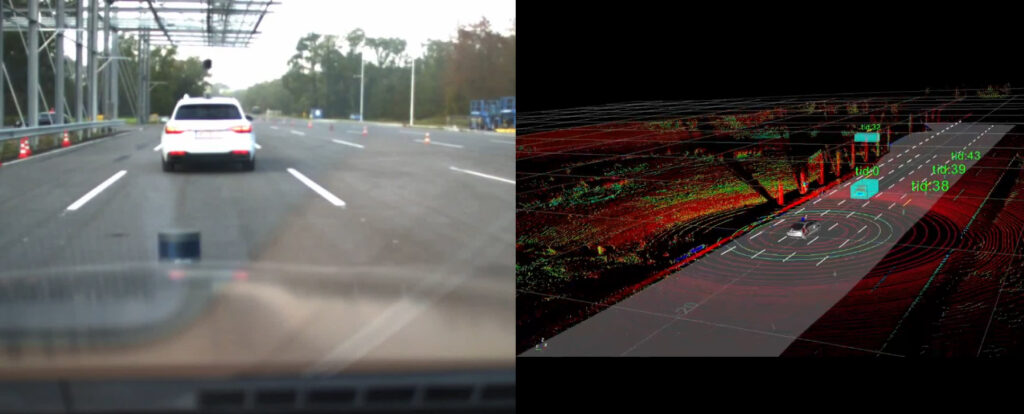
ADAS sensor tests with artificially generated rain – Digitrans Proving Ground for Automated Driving
The Institute of Automotive Engineering at Graz University of Technology, together with project partners, conducted rain tests with ADAS sensors in artificially reproduced rain for the first time on the proving ground in St. Valentin as part of the InVADE project.

Five reasons why we built an outdoor rain plant for testing autonomous driving functions
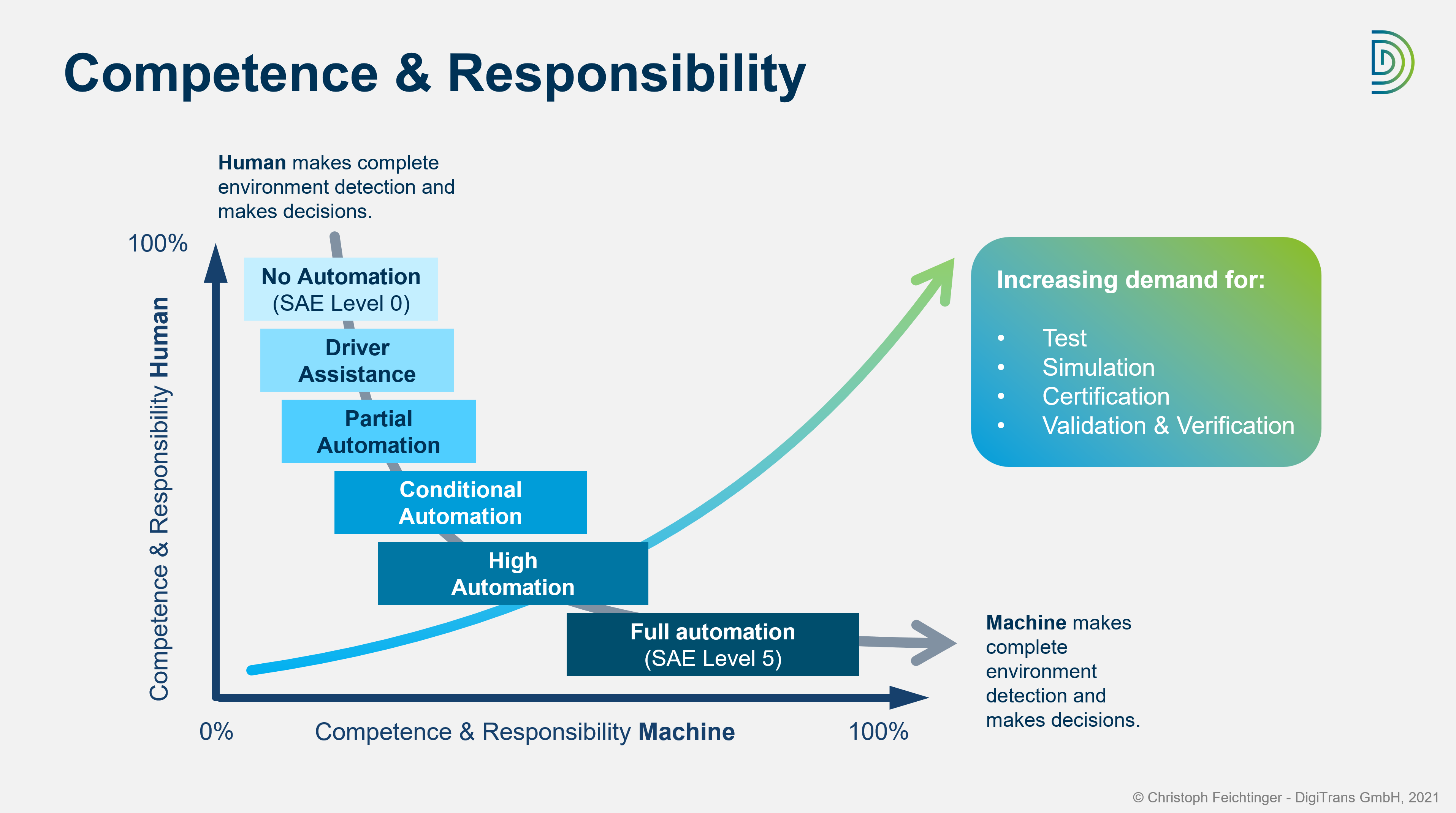
Testing autonomous driving functions and their sensors under adverse weather conditions is an important safety criterion for the introduction of automated vehicles in Europe. Learn why it is becoming increasingly important to test these systems systematically and reproducibly.