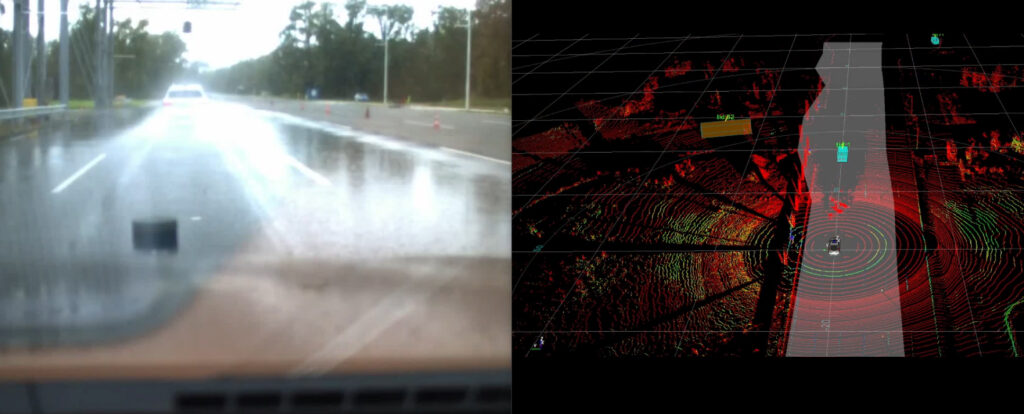




Road weather station provides extensive weather data for the further development of automated driving in rain
A state-of-the-art road weather station supports the experts with a detailed analysis of the environmental conditions and provides a comprehensive real-time data set of the weather conditions on the Proving Ground in St. Valentin.

Clear track for testing automated commercial vehicles
Until now, the use of automated commercial vehicles for testing has been limited. One of the major hurdles up to now has been legislation. At the end of last year, DigiTrans GmbH worked together with Reform-Werke on a change in the law that is unique in Europe.

Five reasons why we built an outdoor rain plant for testing autonomous driving functions
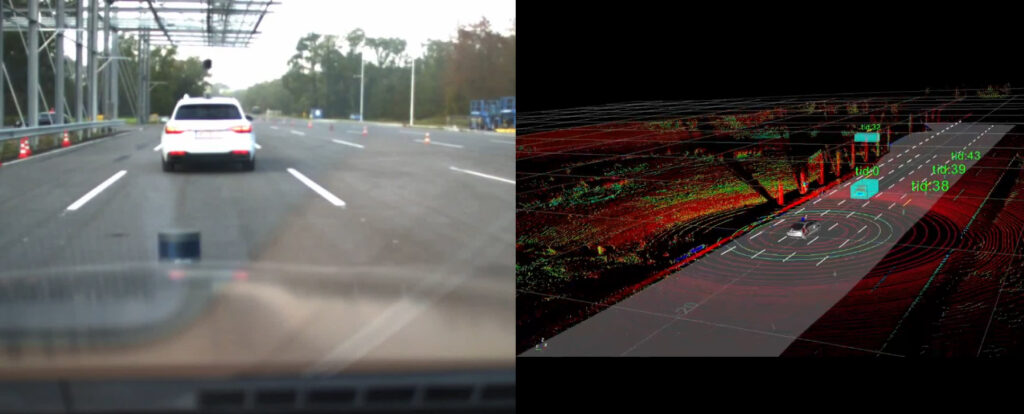
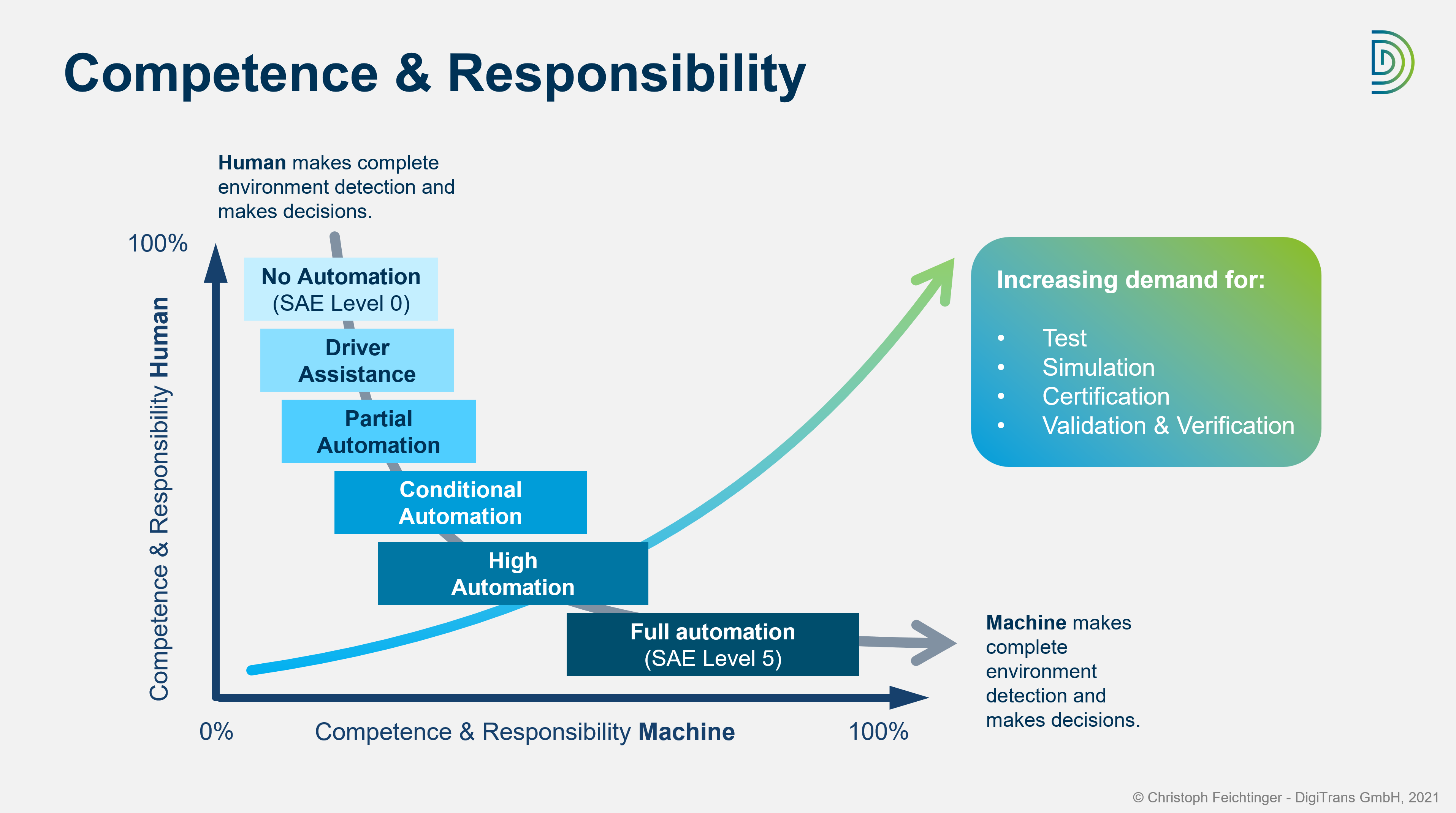
Testing autonomous driving functions and their sensors under adverse weather conditions is an important safety criterion for the introduction of automated vehicles in Europe. Learn why it is becoming increasingly important to test these systems systematically and reproducibly.